Most of us may not believe that self-driving cars will become a reality in the near future (10-15 years). Automobile manufacturers and Tie 1 suppliers are all integrating resources one by one and are laid out at all levels. This article also wants to discuss how automatic driving penetrates into our actual life from the perspective of overall situation and landing. In terms of driving factors, it is mainly based on road safety considerations. For example, in the United States, 35,092 people died in car accidents in 2015, and 94% of accidents were related to driver's decision-making and operational errors. Therefore, regardless of the traffic safety management department, automobile manufacturing companies or technology suppliers, high-tech companies have seen opportunities. First, automatic driving system technology The autopilot system needs to be graded and considered in detail. At present, the United States has formed a unified, SAE International definition of the automation level, as follows: L0: The driver fully controls the vehicle; L1: The automatic system can sometimes assist the driver in completing certain driving tasks; L2: The automatic system can perform certain driving tasks, but the driver needs to monitor the driving environment and complete the remaining parts, and at the same time ensure that there are problems and take over at any time. At this level, the error perception and judgment of the automatic system are corrected by the driver at any time. Most car companies can provide this system. L2 can be divided into different usage scenarios through speed and environment, such as low-speed traffic jams in the loop, fast traffic on the highway, and automatic parking of the driver in the vehicle. L3: The automatic system can perform some driving tasks as well as monitor the driving environment in some cases, but the driver must be ready to regain control of driving (when requested by the automatic system). So at this level, the driver is still unable to sleep or take a deep rest. After the completion of L2, the research field of car companies is extended from here. Due to the special nature of L3, it is currently seen that a more meaningful deployment is to upgrade over high-speed L2; L4: The automatic system can complete the driving task and monitor the driving environment in certain environments and specific conditions; the deployment of L4 is currently based on the use of the city. It can be a fully automated valet parking or it can be direct. Combine with taxi service. At this stage, all the tasks related to driving are irrelevant to the autopilot, and the perception of external responsibility lies in the autopilot system. There are different design and deployment ideas here. L5: All driving tasks that the automated system can perform under all conditions. The autopilot system we are talking about is usually in the 3 to 5 levels. With the improvement of the level, the requirements for the system are also increasing. Due to the current classification of autonomous driving, especially L3 and L4, which are not yet applied in real life on a large scale, we have some cognitive controversy regarding this demand. Classification method: distinguish between DDT, DDT mission support and design operating range; Dynamic Driving Task (DDT): refers to the operations and decision-making behaviors needed to drive a vehicle on the road; Vehicle Execution: Includes lateral movement of the vehicle through the steering wheel, and control of the vehicle through acceleration and deceleration; Sensing and Judgment (OEDR): The operation of the vehicle's longitudinal movement direction, through the object and event detection, cognitive classification and subsequent response, to achieve the monitoring of the vehicle's surrounding environment and the implementation of the corresponding operation, vehicle movement plan and external information transfer. DDT Fallback: During the design of autopilot, it is necessary to consider whether a system failure (failure causing the system to malfunction) occurs or occurs beyond the original operating design range of the system. At the time, we need to give a solution to minimize the risk. The ODD is a group of parameters that determine the weather conditions, road conditions (straight roads, radius of bends), vehicle speed, and traffic flow that we know, to ensure that the capabilities of the system are within a safe environment. Fig. 1 Comparison of design application L2 combined driving Drivers and cars share control rights, and the system has both vertical and lateral automatic controls and has more than two. During the entire opening process, the driver may not operate the steering wheel, throttle and brakes (giving up the main control rights) but need to observe the surroundings and provide safe operation. The driver must be on standby at any time, and the system must be connected at any time in the event of a system exit and system error. Autopilot: We decompose from control and perception The requirements for actuators can be seen by the need to integrate control of the longitudinal powertrain and brake systems and the lateral steering system. Figure 2 How L2 Works Zhejiang Baishili Battery Technology Service Co,.Ltd. , https://www.bslbatteryservice.com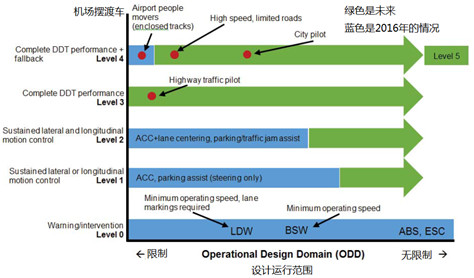
How big is the gap between driverless and Chinese? What are the domestic technologies?
How big is the gap between driverless and Chinese? What are the domestic technologies? Most of us may not believe that self-driving cars will become a reality in the near future (10-15 years).